On the afternoon of August 28th, at the AutoCC 2025 Intelligent Driving Navigation Ecological Innovation Summit, the leader of NIO's map engine team and; Expert Yang Yuekun delivered a keynote speech titled "Prospects for the Scale of Navigation Empowered Intelligent Driving".

Yang Yuekun stated that the cockpit intelligent agent and intelligent driving VLA are respectively referred to as the "brain" and "cerebellum", and navigation is the connection between the two.
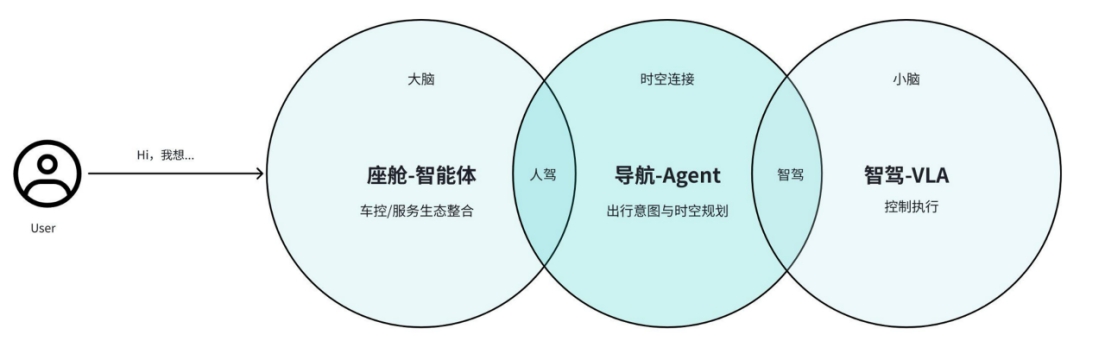
The cockpit is the brain, as all applications require it to carry and make comprehensive judgments; The intelligent driving domain is the cerebellum, responsible for executing control. ”He added that navigation will play a role in connecting time and space, as a key link carrying travel intentions and spatiotemporal planning functions.
In addition, Yang Yuekun pointed out that the iterative process of intelligent driving technology has gone from mainly relying on handwritten rules and a large number of high-precision maps and navigation routes in the early stage, to end-to-end, NOA, and now the large model stage. With the enhancement of intelligent and perceptual models for bicycles, it no longer relies on a full range of high-precision maps. With just some light map data, combined with navigation routes and some navigation information, it is possible to achieve full scene and full domain intelligent driving
Yang Yuekun stated that in the data loop of autonomous driving, navigation participates in multiple stages such as data generation, collection, storage, mining, annotation, model training, simulation verification, and final deployment and operation. In the entire universal data loop, navigation (data) is deeply involved










